
 Tuleviku tööstuses on üha olulisem roll tööstusrobotitel, mis suudavad inimesega koostööd teha. Seejuures on turvalise koostöö tagamisel võtmeroll veatul suhtlusel. ÕÜF-i tootmisettevõtete andmehõive ja -analüüsi töörühm on Tartu Ülikooli robootika kaasprofessori Karl Kruusamäe eestvedamisel leidnud viisi, kuidas robot saaks inimesele kuvada infot oma järgmisena kavandatava liigutuse kohta. Siinkohal võib tööohutuse tagamiseks olla abi juba sellestki, kui robotiga töötav inimene teab kolm sekundit ette, milline on roboti järgmine samm. Teaduspublikatsioonis tutvustatakse sellise rakenduse võimalusi suusakomplekti koostamise näitel.
Tuleviku tööstuses on üha olulisem roll tööstusrobotitel, mis suudavad inimesega koostööd teha. Seejuures on turvalise koostöö tagamisel võtmeroll veatul suhtlusel. ÕÜF-i tootmisettevõtete andmehõive ja -analüüsi töörühm on Tartu Ülikooli robootika kaasprofessori Karl Kruusamäe eestvedamisel leidnud viisi, kuidas robot saaks inimesele kuvada infot oma järgmisena kavandatava liigutuse kohta. Siinkohal võib tööohutuse tagamiseks olla abi juba sellestki, kui robotiga töötav inimene teab kolm sekundit ette, milline on roboti järgmine samm. Teaduspublikatsioonis tutvustatakse sellise rakenduse võimalusi suusakomplekti koostamise näitel.
Teemast saab rohkem teada artiklist „An Augmented Reality Interface for Safer Human-Robot Interaction in Manufacturing“
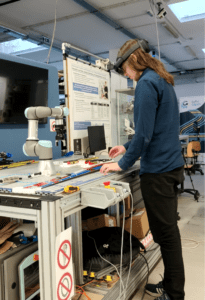
Videoklipis näeb, kuidas operaator koostöörobotiga liitreaalsuses tegutseb:



